ANYBOT
JCOE PCS ROBOT SYSTEM
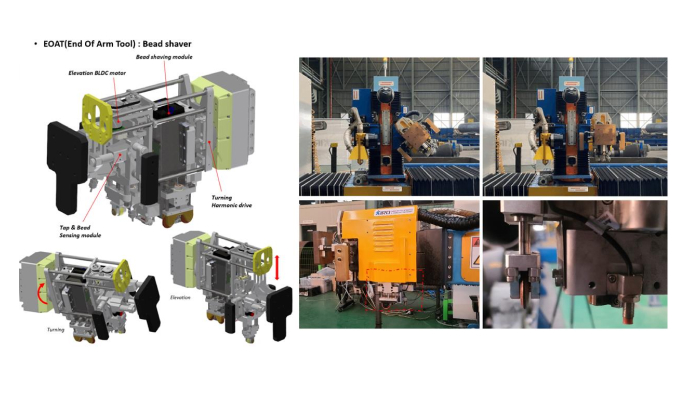
Pipe End Tab Cutting and Internal Welding Bead Shaving Robot System
관단탭 인식 기술
- 접촉 기반 센싱 기술로 관단탭 컷팅 위치 정보 추출
관단탭 플라즈마 컷팅
- 배관 선단, 후단에 부착된 관단탭 플라즈마 컷팅
용접비드 인식 기술
- 비접촉 기반 센싱 기술로 배관 내 용접비드 형상 감지
내면 용접비드 쉐이빙
- 정밀 절삭 기술로 API 스펙 충족



- 01
- JCOE PCS
- JCOE PCS ROBOT SYSTEM
- JCOE PCS ROBOT SYSTEM은 대형 배관 제조 공정에서 관단탭 제거와 내면 용접 비드 쉐이빙을 자동화하여 작업 품질과 효율성을 높이는 로봇 시스템입니다.
- 02
- 핵심기술
- Key technology
- 비접촉 기반 실시간 센싱 기술 : 용접 비드 형상 및 상태 실시간 감지
- 센싱 데이터 기반 모션 제어 기술 : 센싱 데이터를 통한 로봇 동작 최적화
- 플라즈마 컷팅 및 정밀 절삭 기술 : 관단탭 제거, 용접 비드 쉐이빙 자동화로 API 스펙 충족 *shaving(절삭), remover(제거)
- 다양한 배관 규격 대응 : 다양한 배관 크기(D 457mm ~ 1,625mm)와 두께(7.9T ~ 50.8T) 대응 가능
- 03
- 활용분야
- Application
-
JCOE 강관 제조 공정
관단탭 제거 및 내면 비드 쉐이빙 작업 자동화 -
강관 품질 관리
API 스펙 충족, 강관 품질 향상 -
작업 효율화
수작업 대체로 작업 속도 및 생산성 향상