ANYBOT
PIRO GRINDING
Pipe Eye-Ball Vision Inspection and Grinding Robot
스파이럴 터닝 구동
- 스파이럴 터닝 메커니즘 기반 배관 내부를 나선형으로 주행하며 균일한 검사 및 연마 가능
용접 스패터 검사
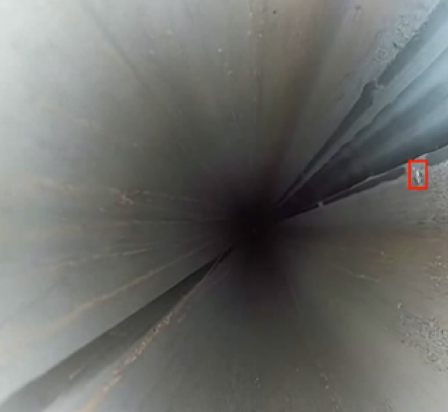
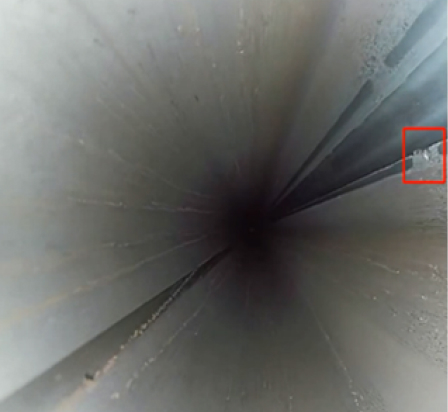
- 실시간 영상 인식 알고리즘 기반 용접 스패터 눌림 검사
위치 정보 추출
- 용접 스패터 눌림 위치 정보 추출 : 거리, 용접 비드 기준 각도
자동 연마 기능
- 용접 스패터 위치정보 기반 연마 모듈을 통한 자동 연마
- 01
- 파이로 그라인딩
- PIRO GRINDING
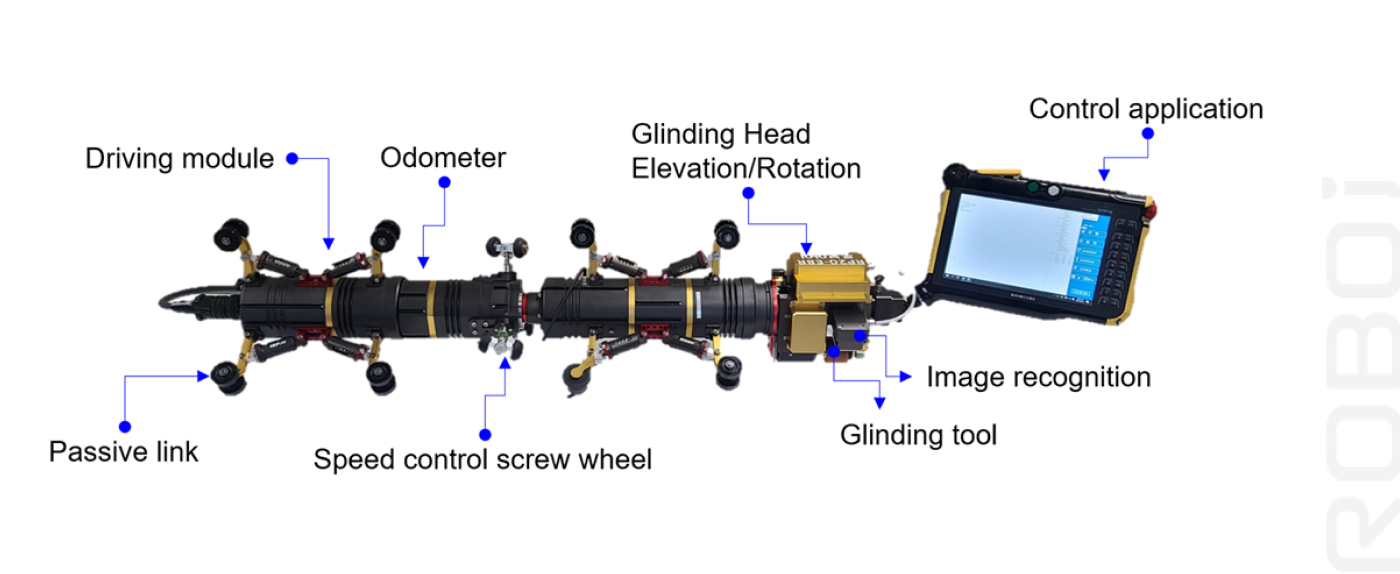
- PIRO GRINDING은 다축 링크 메커니즘 구조와 스파이럴 터닝 메커니즘을 적용해 배관 내부를 주행하며, 비전 인식 기술로 용접 스패터 눌림을 감지하고 감지된 위치를 기반으로 자동 연마 모듈을 통해 용접 스패터 눌림을 연마하는 로봇입니다.
- 02
- 핵심기술
- Key technology
- 다축 구조 배관 주행 로봇 플랫폼 : D 175mm ~ 250mm 배관 관경에 대응하는 주행 기술
- 스파이럴 터닝 메커니즘 : 배관 내부를 나선형으로 주행하며 균일한 검사와 연마 지원
- 비전 인식 기반 용접 스패터 검사 기술 : 비전 알고리즘으로 용접 스패터 눌림 감지 및 위치 추출 기술
- 자동 연마 모듈 및 정밀 모션 제어 기술 : 용접 스패터 위치 데이터 기반 자동 연마 작업 수행
- 03
- 활용분야
- Application
-
연료 및 석유 파이프라인
용접 스패터 눌림 제거 및 용접부 결함 조기 감지 -
에너지 강관 품질 검사
용접 스패터 눌림 및 기타 결함의 비전 검사 -
배관 내부 연마 작업
비전 검사 후 용접 스패터 눌림 문제를 자동 연마하여 강관의 품질 향상 -
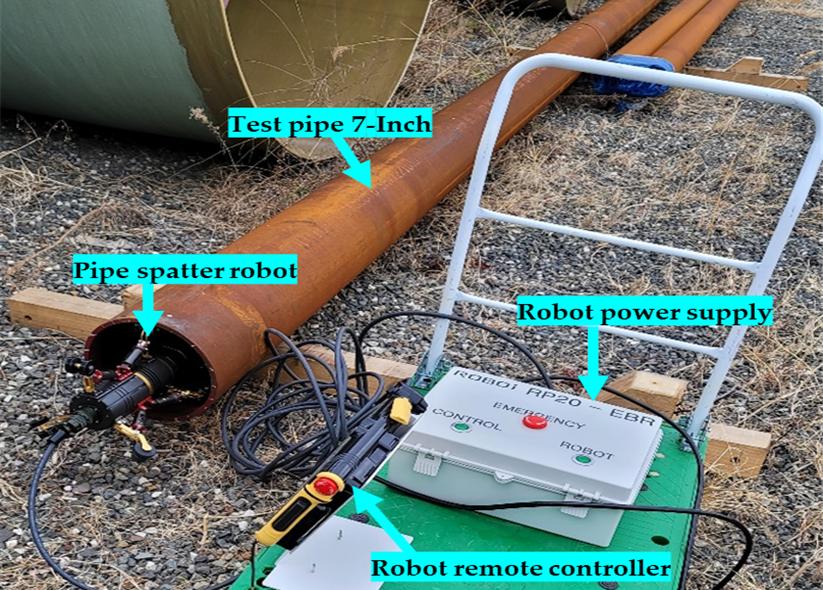
장거리 배관 유지보수
최대 20m까지 배관 검사와 연마 작업이 가능하여 효율적인 관리