ANYBOT
PIRO VISION
Pipe Vision Inspection Robot
용접 스패터 눌림 검사
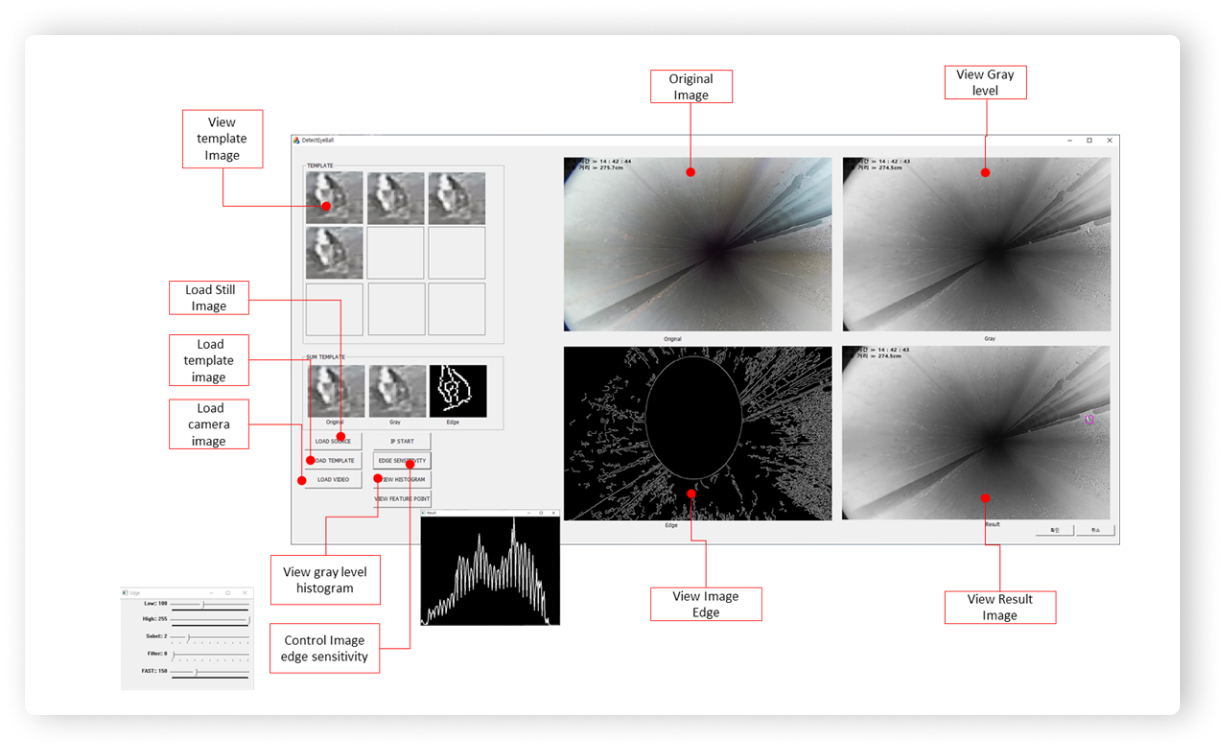
- 실시간 영상 인식 알고리즘 기반 용접 스패터 눌림 검사
위치 정보 추출
- 용접 스패터 눌림 위치 정보 추출 : 거리, 용접 비드 기준 각도
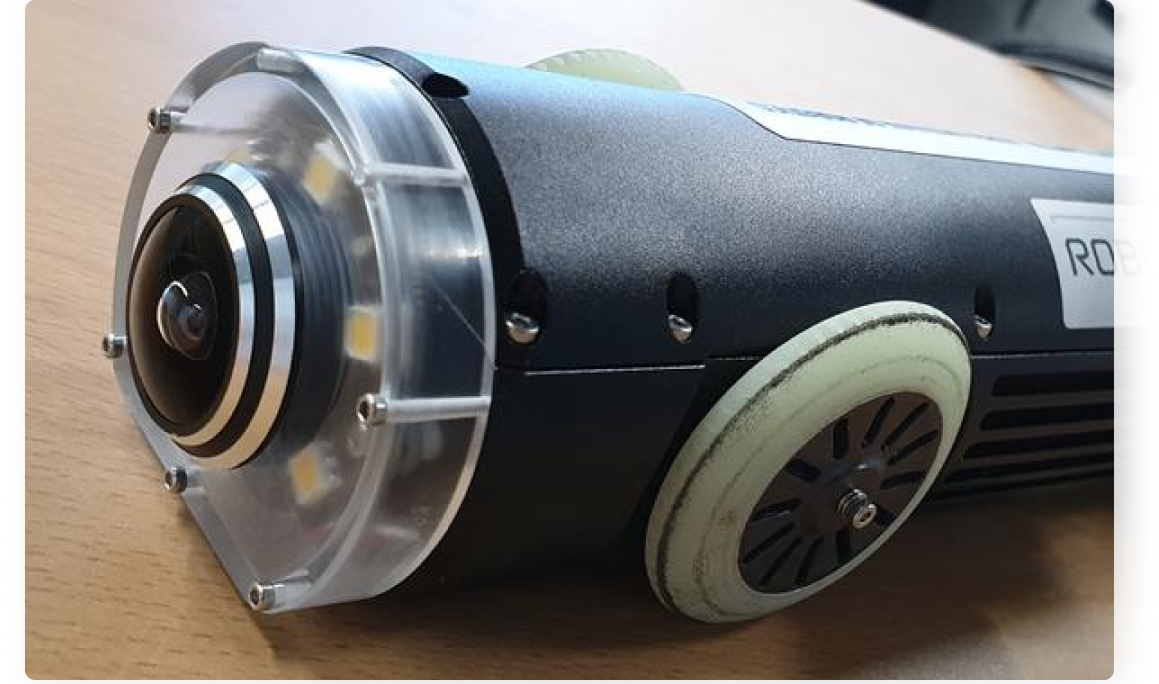
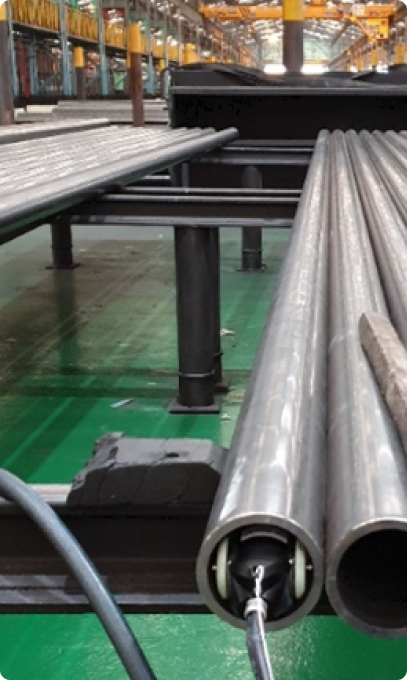
소형 배관 주행
- D 60mm ~ 89mm(2~3인치)의 소구경 배관 주행

- 01
- 파이로 비전
- PIRO VISION
- PIRO VISION은 소형 배관 주행 로봇 플랫폼을 기반으로 배관 내부를 주행하며 용접 스패터 눌림 현상을 검사하는 로봇입니다.
- 02
- 핵심기술
- Key technology
- 소형 배관 주행 로봇 플랫폼 : D 60mm ~ 89mm 배관 내부를 주행하는 소형 로봇 기술
- 영상 처리 알고리즘 기반 비전 검사 기술 : 배관 내부를 실시간 분석 및 진단하는 영상 처리 알고리즘
- 용접 스패터 눌림 현상 감지 기술 : 용접 스패터 눌림 현상(1~3mm) 감지 및 데이터화 기술
- 위치 정보 추출 기술 : 배관 거리와 용접 비드 각도로 이상 위치를 파악하는 기술
- 03
- 활용분야
- Application
-
소형 배관 검사
소구경 배관 내부의 상태 점검 및 결함 분석 -
용접 스패터 눌림 검사
용접 품질 및 배관 상태의 문제를 감지하여 유지보수 효율성 향상 -
위치 정보 분석
내부 거리 및 각도 정보를 통해 배관 상태 보고 및 관리