ANYBOT
PIRO GRINDING
Pipe Eye-Ball Vision Inspection and Grinding Robot
Spiral Turning Drive
- Based on a spiral turning mechanism, enables helical driving inside pipes for uniform inspection and grinding.
Weld Spatter Pressing Inspection
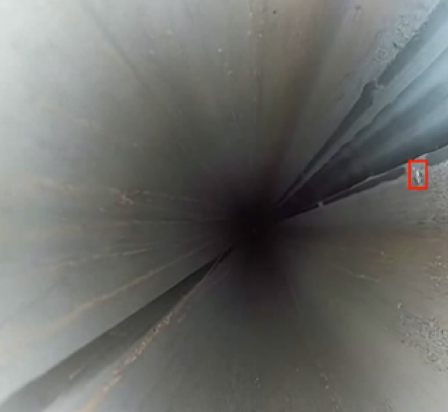
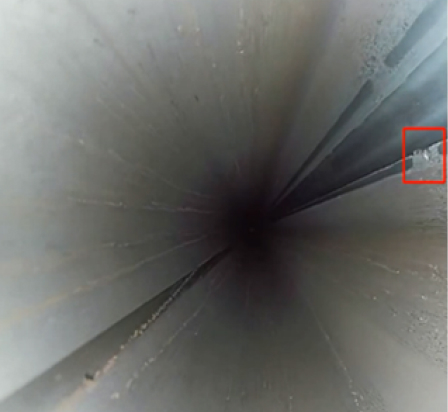
- Inspection of welding spatter pressing based on real-time vision recognition algorithm
Position Information Extraction
- Extraction of weld spatter pressing position information : distance, weld bead reference angle
Automated Grinding Function
- Automatic grinding using a grinding module based on welding spatter position information.
- 01
- PIRO GRINDING
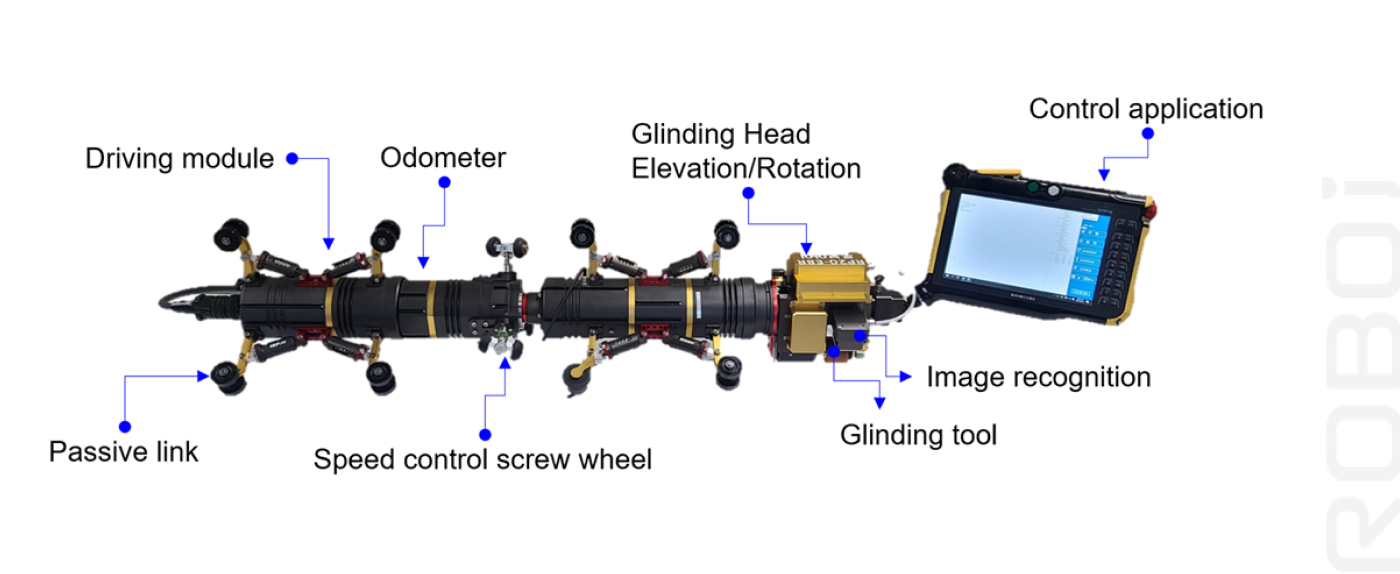
- PIRO GRINDING is a robot that drives inside pipes using a multi-link mechanism structure and a spiral turning mechanism. It detects welding spatter pressing through vision recognition technology and grinds the detected spatter pressing automatically using a grinding module based on its position.
- 02
- Key technology
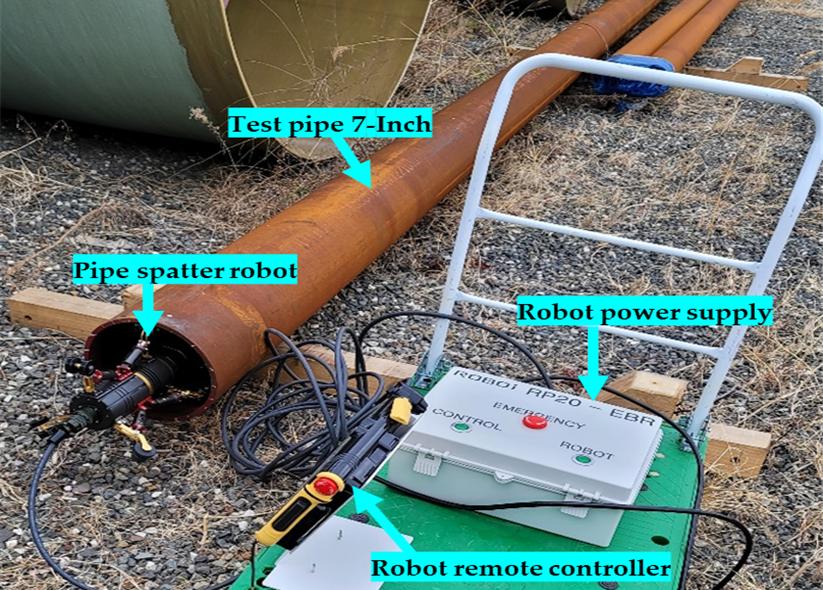
- Multi-Axis Pipe-Driving Robot Platform : Driving technology adaptable to pipe diameters of D 175mm to 250mm.
- Spiral Turning Mechanism : Drives inside pipes in a spiral motion to enable uniform inspection and grinding.
- Vision-Based Welding Spatter Inspection Technology : Detects welding spatter pressing and extracts position information using vision algorithms.
- Automated Grinding Module and Precision Motion Control : Performs automated grinding based on Spatter location data.
- 03
- Application
-
Fuel & Oil Pipeline
Removal of Welding Spatter Pressing and Early Detection of Weld Defects -
Energy Steel Pipe Quality Inspection
Vision-based inspection of welding spatter pressing and other defects. -
Internal Pipe Grinding
Automatically grinds welding spatter pressing issues after vision inspection to improve steel pipe quality. -
Long-Distance Pipe Maintenance
Enables efficient inspection and grinding for pipes up to 20m in length.